 |
Estimating Joint Kinematics using Wearable Inertial Measurement Units
Collaborators: Noel Perkins
Joint kinematics, namely joint angles, are a widely used metric of human performance and health spanning a number of disciplines including human biomechanics, human factors, and ergonomics. Optical (camera-based) motion capture systems are well-suited to providing joint kinematic data at the cost of conducting the data collections in a laboratory setting. On the other hand, inertial measurement unit (IMU)-based motion capture, allows for studying human movement in natural settings. However, there are a number of unique complexities to deriving joint angles from IMU data.
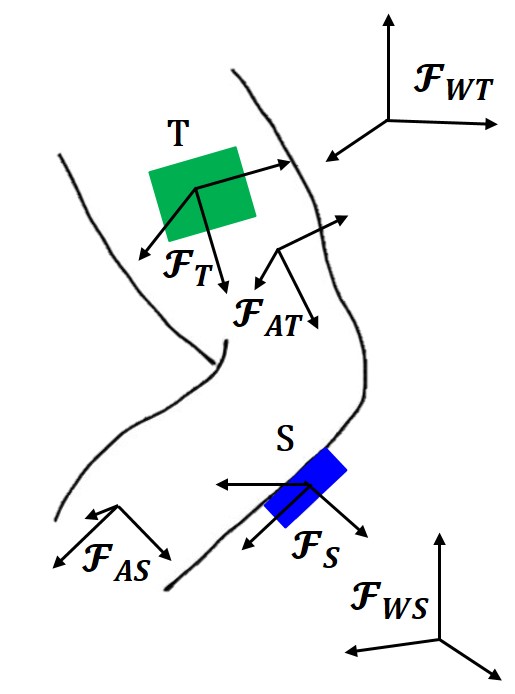
The challenge of extracting joint angles from IMU data requires a sequence of estimations that define: 1) the orientation of the IMU frames relative to their independent world frames, 2) the orientation of their independent world frames relative to each other, and 3) the orientation of the IMU frames relative to their respective body segment anatomical frames. This work contributes a measurement theory to correct for the inevitable integration drift error arising in this sequence of estimates without reliance on magnetometer data.
|
 |
Automated Measurement System for Warfighter Performance Quantification
Collaborators: Noel Perkins, Leia Stirling
Warfighter performance is difficult to understand, monitor, and quantify. The associated challenges are the result of the diverse, complex tasks that warfighters perform, the variability in human performance, the environments in which warfighters operate, and the limited knowledge of the measures that characterize task-specific success and failure. Additional confounding effects include equipment (e.g., load, bulk, and stiffness), training, and performance degradation (e.g., fatigue).
This project utilizes an array of wearable inertial measurement units (IMUs) to evaluate performance across multiple tasks and the effects of body-borne loads on performance in the context of an outdoor obstacle course known as the Load Effects Assessment Program (LEAP). This work addresses a major need of military organizations that frequently employ the LEAP to understand how added loads influence warfighter performance. Importantly, the findings and conclusions drawn from the nontraditional metrics of performance derived from the IMU data would not be possible using timing metrics, which are historically used to evaluate performance.
|
 |
iNewton - Engaged Learning for Undergraduate Engineering Dynamics
Collaborators: Cindy Finelli, Noel Perkins
Active learning is broadly defined as any instructional practice that involves students in the learning process, and common approaches include techniques like cooperative learning, problem-based learning, and experiential learning. Educational research provides strong evidence that active learning results in positive gains in student learning and broader educational experiences across a wide variety of science, technology, engineering, and mathematics (STEM) fields. However, adoption of these instructional methods remain low as the result of a common barrier for many instructors: time, both in terms of covering material in class and preparation time outside of the classroom.
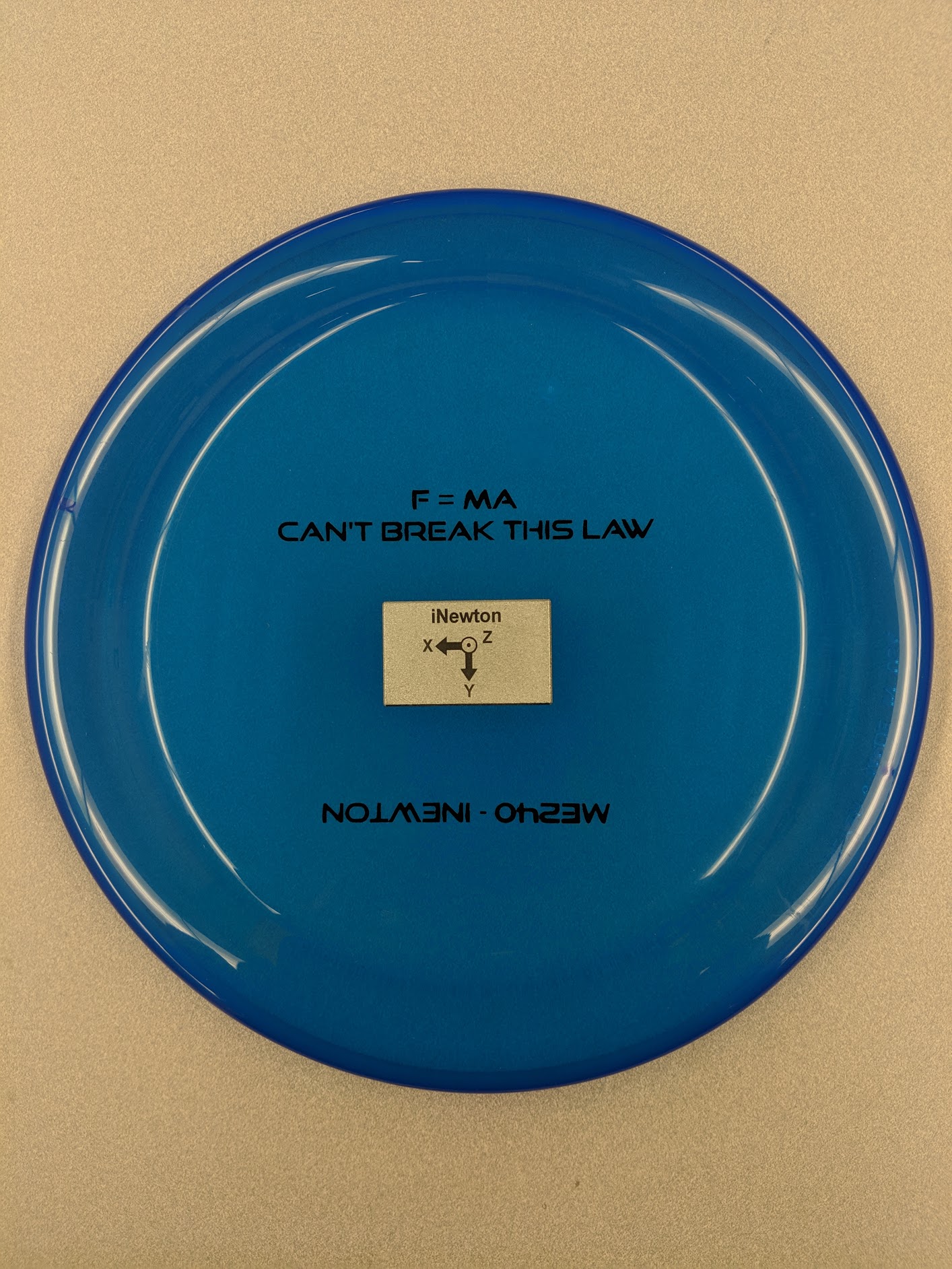
This project introduced a novel learning platform technology, referred to as interactive-Newton or iNewton, to promote the engaged learning of Newtonian mechanics in an undergraduate engineering dynamics course. iNewton delivers an inexpensive and highly portable device for measuring and analyzing motion, essentially a “dynamics laboratory at your fingertips.” It does so at modest cost and without the need for any laboratory infrastructure. The three stages of the project (demonstrations, prescribed experiments, and student projects) revealed greater benefits as student engagement with iNewton increased.
|