|
Human Instrumentation and Robotics (HIR) Lab The mission of our lab is to quantify, understand, and distinguish human movement via wearable technologies to better interpret performance, health, and behavior with applications in human-robot interaction. This research is necessarily interdisciplinary and draws from the fields of engineering dynamics, signal processing, robotics, biomechanics, controls, and human factors, to name a few. One of the many challenges associate with this type of work is a comprehensive definition or metric for performance cannot be defined; in fact, most applications require a task-specific definition of performance that has both physical and operational meaning to the stakeholders involved. Below are examples of projects our lab will be pursuing in the near future including a continuation of my postdoctoral research, which has a corresponding website |
|
 |
Scientific Physical and Operational Characterization (SPOC)
Collaborators: Matthew Miller, Leia Stirling |
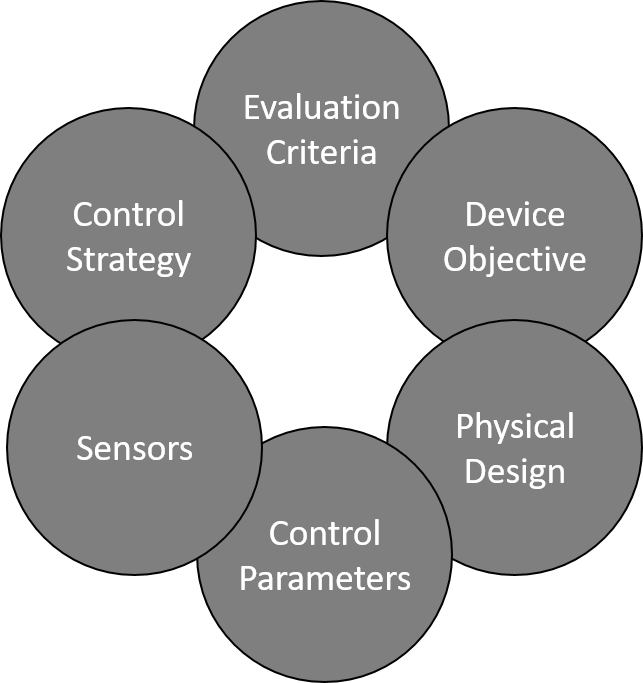 |
Evaluation Framework for Wearable Robotic Devices
Wearable robotic devices like powered exoskeletons and prostheses have enormous potential to assist those with reduced mobility/capabilites or rehabilitation as well as to offload/support loads on the user to reduce energy expenditure and risk of injury. In addition to the challenges associated with the physical design of such devices, most (if not all) evaluations are conducted in a laboratory, often on a treadmill, for which an individual’s kinematics have been shown to differ as compared to their daily activity kinematics. As a result, another ongoing open challenge is providing a framework for determining which products or control strategies is best for an individual, which will be the focus of this project. |
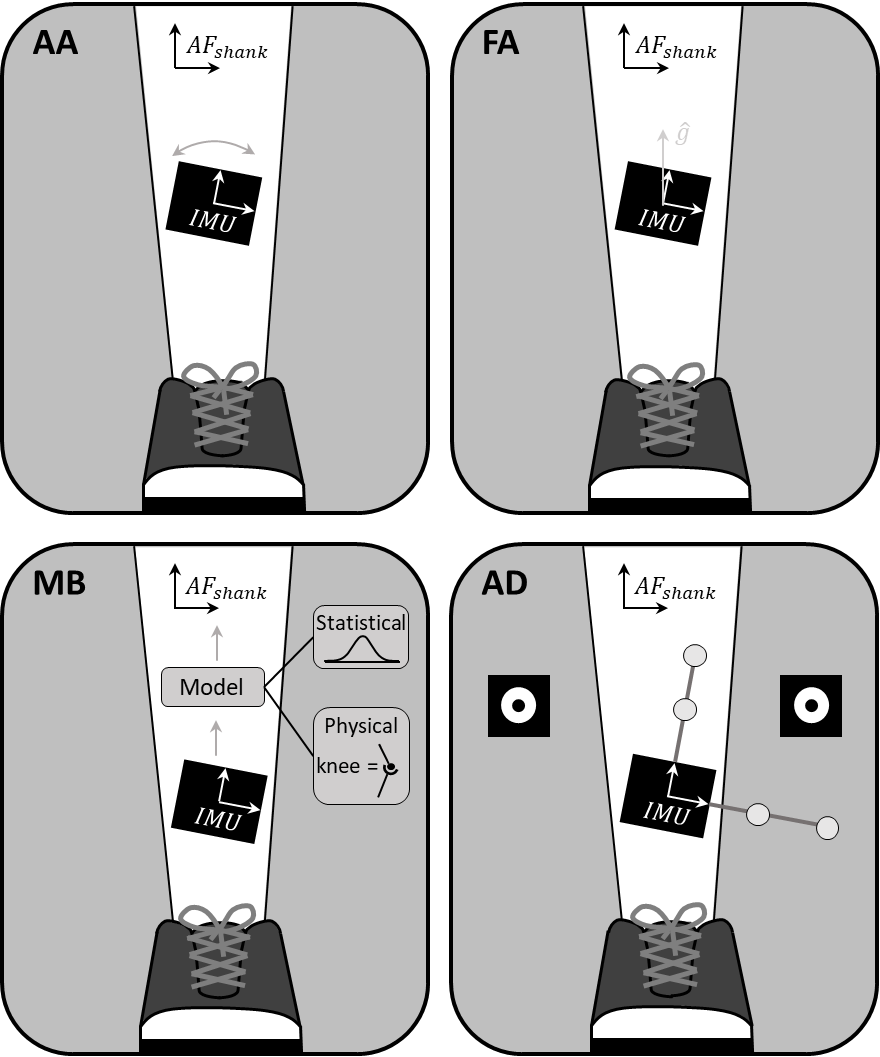 |
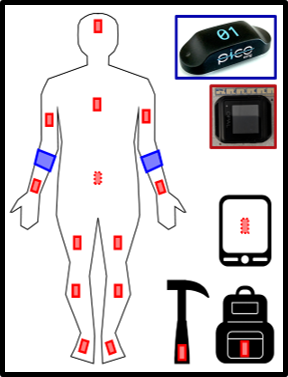
Determining Anatomical Frames of Reference for Inertial Motion Capture
Despite the exponential growth in using IMUs for biomechanical studies, future growth in inertial motion capture is stymied by a fundamental challenge - how to estimate the orientation of underlying bony anatomy using skin-mounted IMUs. This challenge is of paramount importance given the need to deduce the orientation of the bony anatomy to estimate joint angles. Unfortunately, a convention does not yet exist for how to define these anatomical frames for inertial motion capture and the four current approaches in the literature produce significantly different estimates for these frames to a degree that renders it difficult, if not impossible, to compare results across studies. |